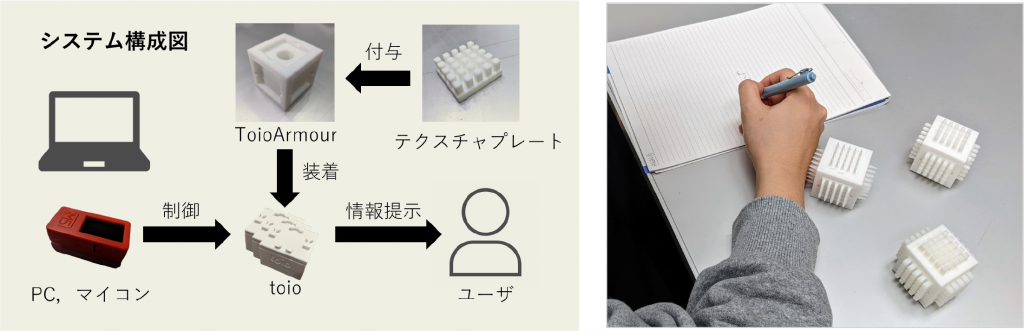
近年,複数台の小型ロボットを用いることで生活空間においてユーザをサポートする研究が行われているが,筐体サイズ等の制約で拡張性に欠ける課題があった.そこで本研究では,複雑な機構や制御を必要としないテクスチャに着目し,複数台の小型ロボットと交換可能なテクスチャを組み合わせた情報提示手法を提案する.さらに,小型ロボットとテクスチャのデジタルツインを仮想空間上に作成し,例示プログラミングを用いて小型ロボットの形状や動きを調整/探索可能な支援ツールを構築する.本システムを用いた性能評価とワークショップを通して,基本的な性能や課題,応用可能性を確認した.
小型キューブ型ロボット toio を使用して実装を行った.利用例の一つを右図に示す.あらかじめ決められた時間になると小型ロボットがユーザの腕に向かって移動し,最初はなだらかなテクスチャで,徐々に鋭く刺激の強いテクスチャで刺激を与える.
発表
家山 剣, 塚田 浩二. 小型ロボットとテクスチャの組合せによる情報提示の探索. 情報処理学会論文誌, Vol.66, No.12, pp.1692-1704. 2025-12-15. https://doi.org/10.20729/0002006324 [PDF]
家山 剣, 塚田 浩二. 例示プログラミングを活用した小型ロボットとテクスチャを組み合わせた情報提示手法の探索. 情報処理学会研究報告, 2025-HCI-212(8), pp.1-8. 2025-3. [PDF]
家山 剣, 塚田 浩二. デジタルツインを活用した小型ロボットとテクスチャを組み合わせた情報提示手法の探索. 情報処理学会 インタラクション2025論文集, インタラクティブ発表, 2B19, pp.701-704. 2025-3. [PDF]
家山 剣, 塚田 浩二. 小型ロボットとテクスチャを組み合わせた情報提示手法の提案. エンタテインメントコンピューティングシンポジウム2023論文集, pp. 262-269. 2023-09-02. [PDF] 【特選セッション発表認定】
家山 剣, 塚田 浩二. 小型ロボットとテクスチャを組み合わせた情報提示手法の提案. WISS2022予稿集, デモ発表, 2-B16. 2022-12. [PDF]
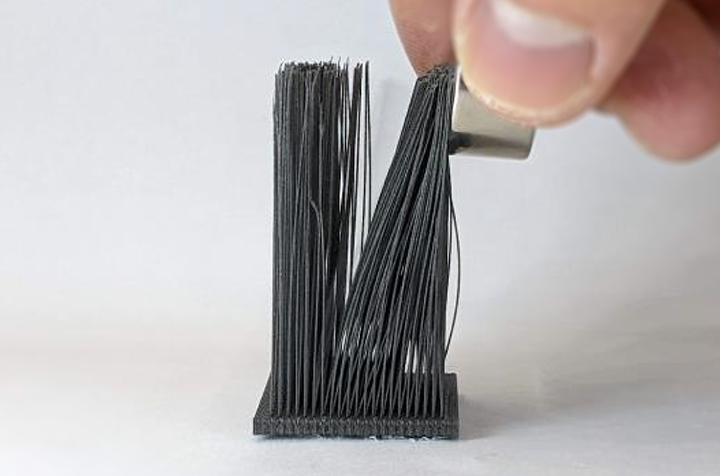
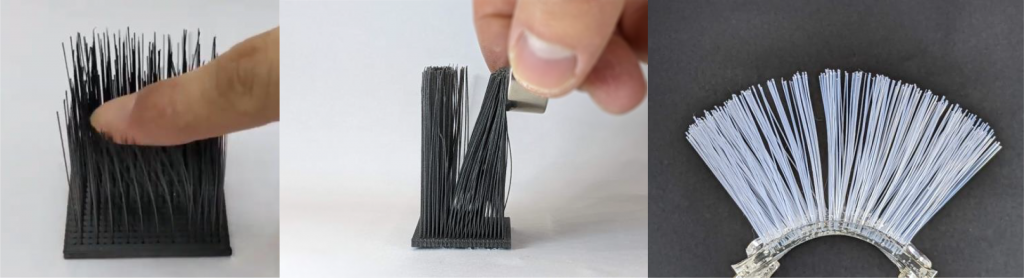
本研究では,安価な熱溶解積層方式の 3D プリンタで造形可能な細かい毛の集合体(毛構造)を活用した毛構造の拡張について提案する.先行研究で提案されていた毛構造の造形手法を活用し,導電性/磁性等を備えるフィラメントを造形に用いる方式や,柔軟に動かせるソフトレジンに毛を埋め込む方式を提案・試作する.
左から,導電性フィラメントで造形した毛構造,磁鉄PLA フィラメントで造形した毛構造と磁石,ソフトレジンを土台に用いた毛構造の例.
VIDEO
鎌田 航誠 高橋 治輝, 塚田 浩二. 導電性・強磁性・および土台の可撓性を持つ毛構造の造形手法と評価. 情報処理学会論文誌, Vol.66, No.2, pp. 381-390. 2025-2-15. https://doi.org/10.20729/0002000029 [PDF]
鎌田 航誠, 高橋 治輝, 塚田 浩二. 導電性/強磁性を併せ持つ毛状の入力インタフェースの提案. 日本ソフトウェア科学会 WISS2024 予稿集, デモ発表 2-B18. 2024-12. [PDF]
鎌田 航誠,高橋 治輝,塚田 浩二.導電性・強磁性・及び土台の可撓性を持つ毛構造の造形手法の提案.日本ソフトウェア科学会 WISS2023予稿集,登壇発表(ショート)/デモ発表,pp.69-75.2023-12.[PDF]
Kosei Kamata, Haruki Takahashi, and Koji Tsukada. 2023. Conductive, Ferromagnetic and Bendable 3D Printed Hair for Designing Interactive Objects. In Adjunct Proceedings of the 36th Annual ACM Symposium on User Interface Software and Technology (UIST ’23 Adjunct). Article 62, pp. 1–3. 2023. https://doi.org/10.1145/3586182.3615823 [PDF]
鎌田 航誠,高橋 治輝,塚田 浩二. 導電性樹脂・磁鉄樹脂を用いた毛構造の3Dプリントと応用. 情報処理学会 インタラクション2023論文集, インタラクティブ発表(プレミアム発表), 2B-50, pp.681-685. 2023-3. [PDF] 【インタラクティブ発表賞(PC推薦)】
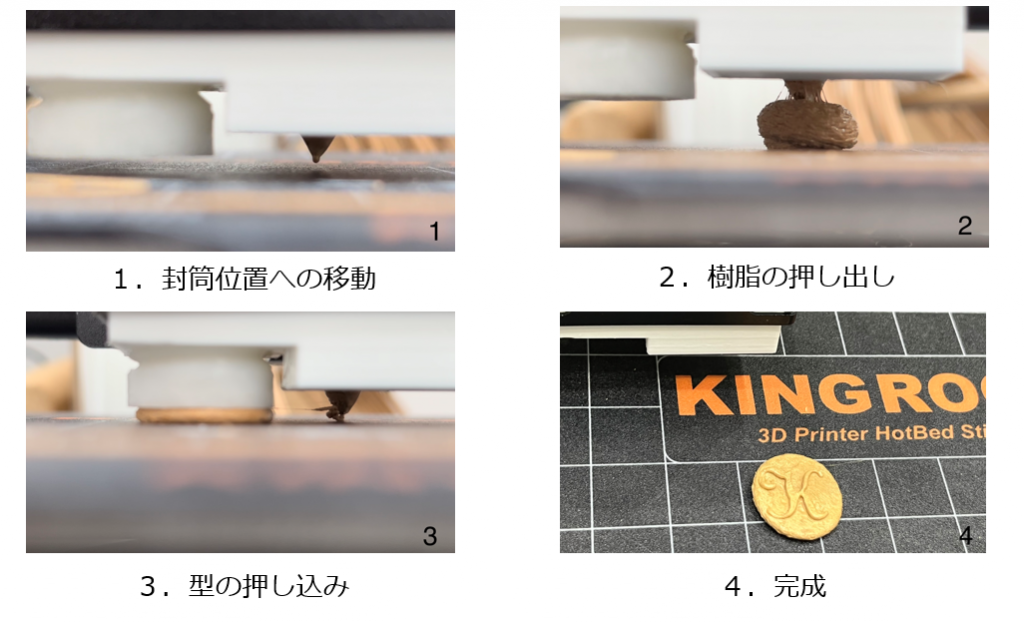
本研究では,熱溶解積層方式 3D プリンタを G-code で直接制御することで,封蝋表現を実現する手法を提案する.具体的には,ノズルの温度をフィラメントの適正温度よりも高温に設定し,一箇所に多量のフィラメントを押し出す.次に,手動または自動で型をフィラメントへ押し込むことで,樹脂を封蝋のように固定する.
作例と制作手順
発表
菊地 勇斗, 塚田 浩二. 3Dプリンタを用いた封蝋表現手法の研究. エンタテインメントコンピューティングシンポジウム2023論文集, pp. 270-278. 2023-09-02. [PDF] 【特選セッション発表認定】
菊地 勇斗, 塚田 浩二. 3Dプリンタを用いた封蝋表現手法の提案. WISS2022予稿集, デモ発表, 3-B04. 2022-12. [PDF] 【対話発表賞(プログラム委員)】
低価格帯3Dプリンタの普及により,個人レベルでも様々な機構部品を設計/出力することが可能になった.しかし,一般に部品設計には専門的なアプリケーションを使いこなす必要があり,習得には多大な時間と労力が掛かる.本研究では,先行研究として提案した「可変抵抗に操作感を付与する外骨格機構 」に焦点を当てた,インタラクティブな機構モデリング支援ツールを作成する.
VIDEO
作成した支援ツール(スライダー型可変抵抗バージョン).先行研究では,3Dモデルを作成するためにスクリプト言語(OpenSCAD)で記述する必要があった.本ツールは触覚パーツのパラメータ(位置や数,種類等)をGUIで入力するため,手軽に設計できる.
発表
山本 侑吾,塚田 浩二.可変抵抗に操作感を付与するためのインタラクティブな機構モデリング支援ツール.インタラクション2022論文集,インタラクティブ発表,1D-07,pp.160-163,2022-02-28.[PDF]
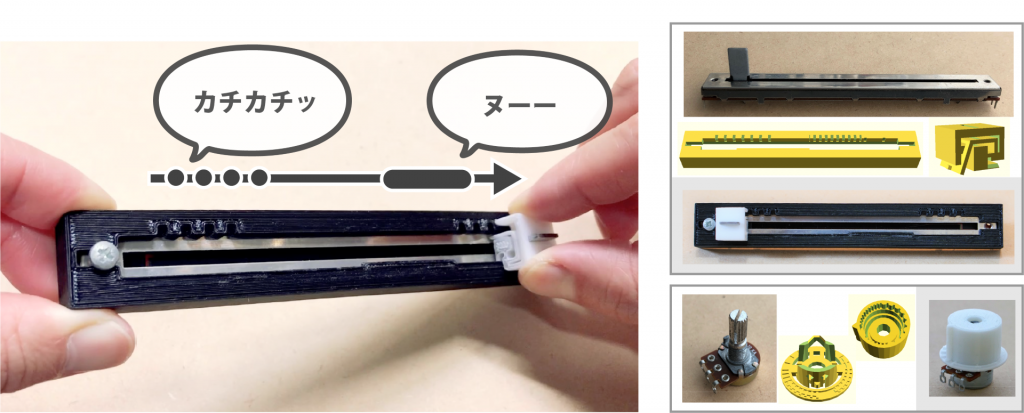
3Dプリンタで造形可能な物理的な機構のみを利用して,可変抵抗(スライダー型/ダイヤル型)に触覚的なフィードバックを与える手法を提案する.一般的な可変抵抗に容易に脱着できる,クリック感と重みを個別に設計できる,低価格なFDM式3Dプリンターで手軽に造形できる,視覚的手掛かりの有無を切り替えて造形できる,等の特徴を持つ.外骨格機構として,スライダー型とダイヤル型の2種類の可変抵抗を対象に実装した.
コンセプト図と構成パーツ例.市販の可変抵抗器(スライダー/ボリューム)に,3Dプリントした軸受けとカバーを取り付けることで,クリック感や重みを付与する.
VIDEO
サンプルデータ
発表
塚田 浩二,新山 大翔,沖 真帆.可変抵抗にクリック感と重みを付与する外骨格機構の提案.インタラクション2021論文集,インタラクティブ発表(プレミアム発表),1B02,pp.193-197,2021-03.[PDF]