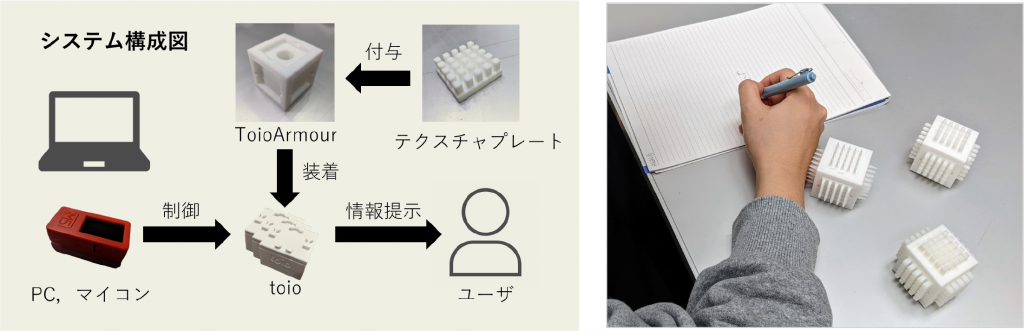
近年,複数台の小型ロボットを用いることで生活空間においてユーザをサポートする研究が行われているが,筐体サイズ等の制約で拡張性に欠ける課題があった.そこで本研究では,複雑な機構や制御を必要としないテクスチャに着目し,複数台の小型ロボットと交換可能なテクスチャを組み合わせた情報提示手法を提案する.さらに,小型ロボットとテクスチャのデジタルツインを仮想空間上に作成し,例示プログラミングを用いて小型ロボットの形状や動きを調整/探索可能な支援ツールを構築する.本システムを用いた性能評価とワークショップを通して,基本的な性能や課題,応用可能性を確認した.
小型キューブ型ロボット toio を使用して実装を行った.利用例の一つを右図に示す.あらかじめ決められた時間になると小型ロボットがユーザの腕に向かって移動し,最初はなだらかなテクスチャで,徐々に鋭く刺激の強いテクスチャで刺激を与える.
発表
家山 剣, 塚田 浩二. 小型ロボットとテクスチャの組合せによる情報提示の探索. 情報処理学会論文誌, Vol.66, No.12, pp.1692-1704. 2025-12-15. https://doi.org/10.20729/0002006324 [PDF]
家山 剣, 塚田 浩二. 例示プログラミングを活用した小型ロボットとテクスチャを組み合わせた情報提示手法の探索. 情報処理学会研究報告, 2025-HCI-212(8), pp.1-8. 2025-3. [PDF]
家山 剣, 塚田 浩二. デジタルツインを活用した小型ロボットとテクスチャを組み合わせた情報提示手法の探索. 情報処理学会 インタラクション2025論文集, インタラクティブ発表, 2B19, pp.701-704. 2025-3. [PDF]
家山 剣, 塚田 浩二. 小型ロボットとテクスチャを組み合わせた情報提示手法の提案. エンタテインメントコンピューティングシンポジウム2023論文集, pp. 262-269. 2023-09-02. [PDF] 【特選セッション発表認定】
家山 剣, 塚田 浩二. 小型ロボットとテクスチャを組み合わせた情報提示手法の提案. WISS2022予稿集, デモ発表, 2-B16. 2022-12. [PDF]
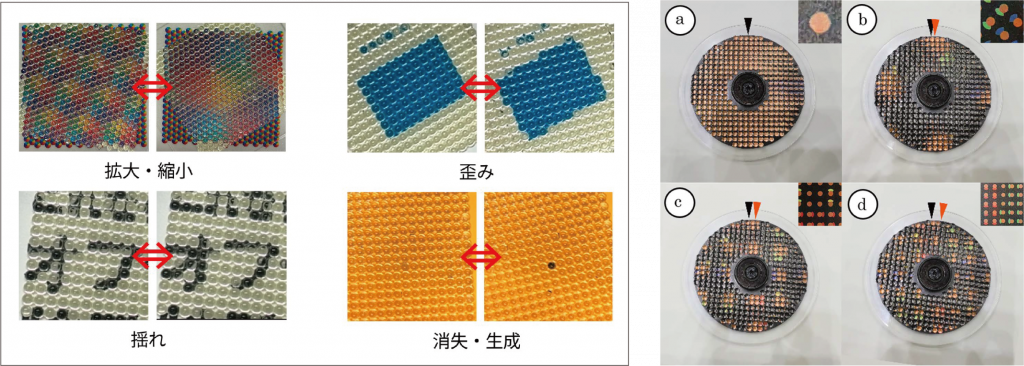
視点の変化によって異なる画像や動きを知覚させる技術として,レンチキュラやスリットアニメーションが知られている.本研究では,こうした視点依存的な視覚効果を応用し,情報提示や装飾的応用に活用できる新たな表現手法を模索する.具体的には,レンズアレイと画像パターンとの相対的な位置関係を変化させることで得られる視覚効果に注目し,回転移動に焦点を当てたプロトタイプを作成した.位置関係の変化の再現性を高めた状態で,多様な画像パターンを検証することで,視覚効果の発生条件を探索する.
凸レンズを複数配置した透明板(図左)と画像パターンを印刷した板(図中央)を重ね,中心を軸で固定して回転移動による視覚効果を確認できるようにした(図右).画像パターンを交換し,様々な効果を検証する.
視覚効果例.レンズアレイの移動により,「拡大・縮小」「歪み」「揺れ」「生成・消失」が観察されることに着目した.プロトタイプをゆっくり回転させることで,画像パターンの模様が拡大・縮小(ズームイン・ズームアウト)するような効果を確認できた(右図a~d).
発表
鈴木 麻央,沖 真帆,塚田 浩二. 可動式レンズアレイを用いた情報提示手法の基礎検討. 日本ソフトウェア科学会 WISS2025 予稿集, デモ発表 2-C11. 2025-12. [PDF]
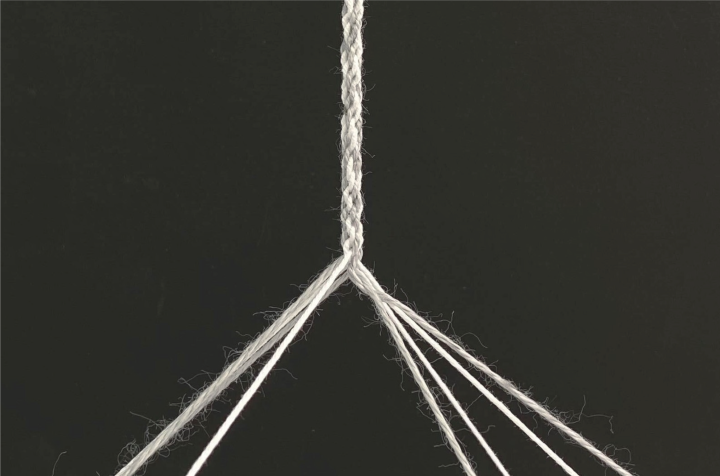
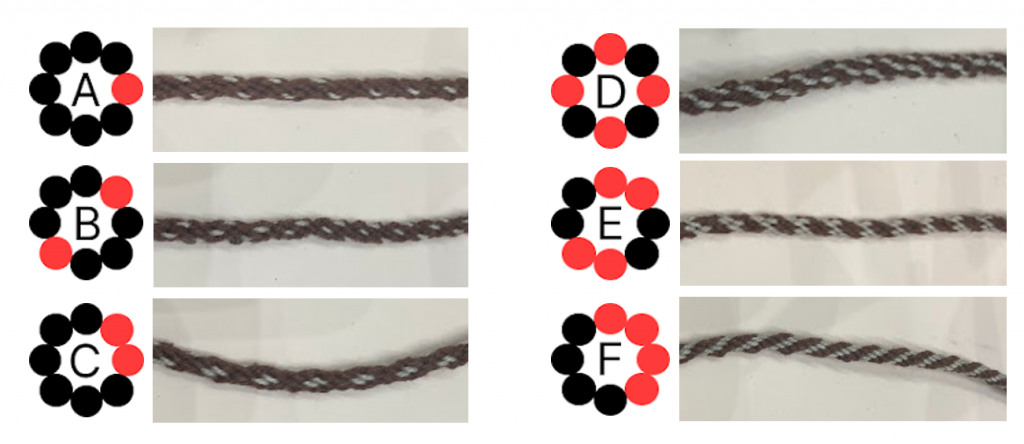
組紐は,柔軟性と強度を併せ持つため,固定や装飾等の多様な用途に利用できる.さらに,材料となる紐を変えることで,外観も美しくデザインできる.本研究では,導電糸と紐の組み方をカスタマイズすることで,異なる特性を持った導電組紐を製作する.さらに,製作した導電組紐の引っ張りや結んだ際の電気的な特性を測定し,その性能を調査する.これらの実験結果に基づき,導電組紐を活用したタンジブル・インタフェースの基礎検討を行う.
製作した導電組紐とその特徴
検証した8打ちのパターン(6種類・約20 cm)
発表
穂積 佳,塚田 浩二,吉田 博則. 機能性繊維を用いた組紐型デバイスの伝統的道具への応用. 日本ソフトウェア科学会 WISS2025 予稿集, デモ発表 1-C07. 2025-12. [PDF]
穂積 佳, 塚田 浩二, 吉田 博則. 導電糸とサーモクロミック糸を用いた 入出力が可能な組紐型デバイスの製作. 情報処理学会 インタラクション2025論文集, インタラクティブ発表(プレミアム発表), 3B58, pp.1272-1277. 2025-3. [PDF]
穂積 佳, 塚田 浩二, 吉田 博則. 導電糸を活用した組紐型タンジブル・インタフェースの基礎検討. 情報処理学会研究報告, 2024-HCI-208(24), pp.1-7. 2024-6. [PDF] 【HCI研究会 2024年度学生奨励賞】
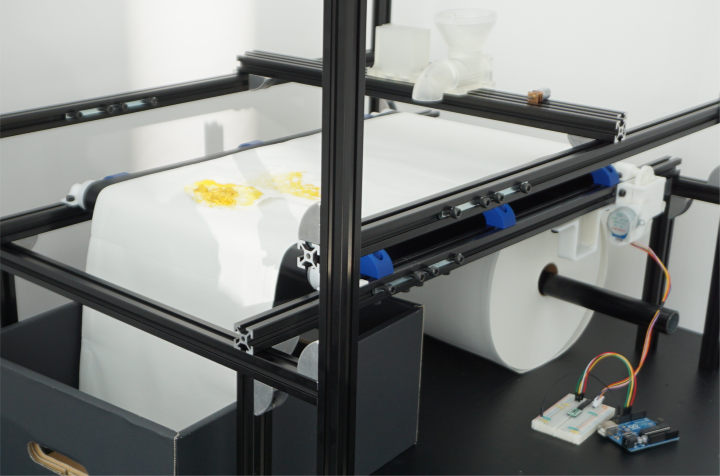
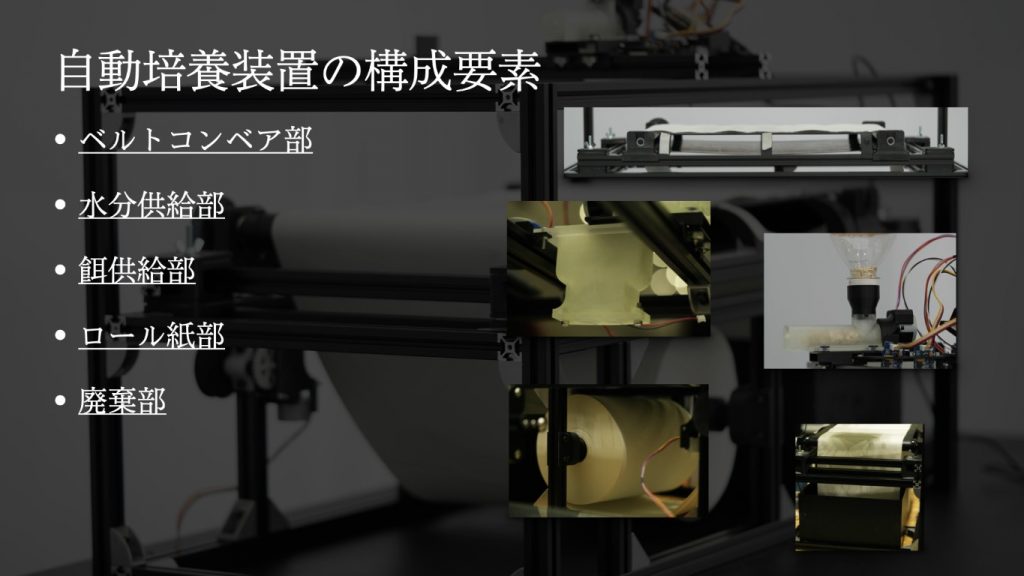
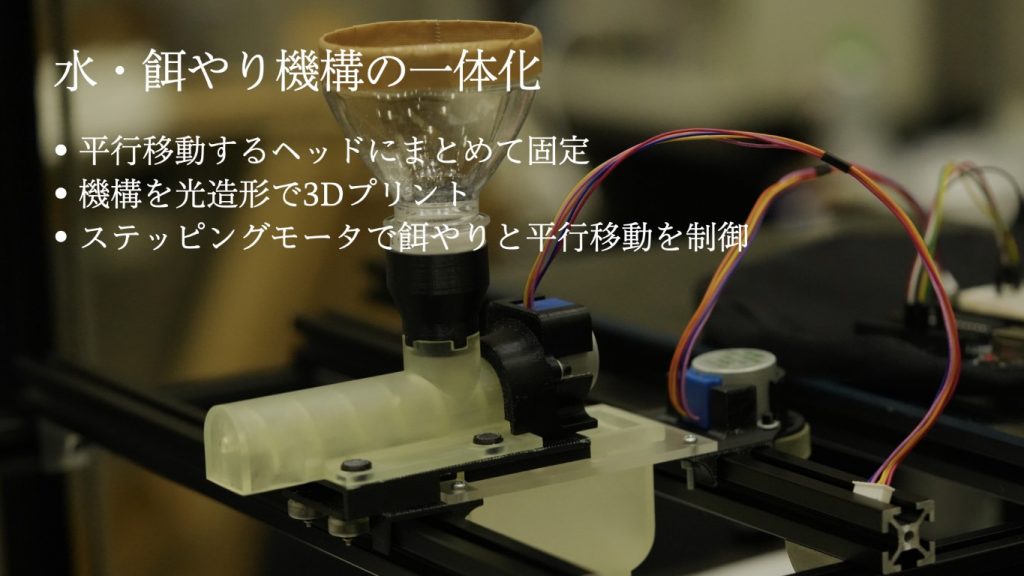
本研究では,粘菌をデジタルファブリケーションの系に組み込むための自動培養システムを提案する.粘菌は環境や刺激に応じて,広がり方が異なる特性を持ち,HCI 研究や芸術表現にとって可能性のあるマテリアルである.一方,粘菌の培養を日常生活環境で行うことは難しい.湿度や温度を一定に保ったり,餌を適度に与えるだけでなく,培地を定期的に交換する必要がある.そこで,本提案では粘菌の自動培養装置「SlimeMolder」を開発し,多彩なインタラクションや表現分野で活用可能な,粘菌ファブリケーション基盤を構築する.
発表・採択
Kaito Sakoda, Amane Tai, and Koji Tsukada. Slime-Molder: Fabrication System for Human–Slime Mold Co-Creation. In Adjunct Proceedings of the 38th Annual ACM Symposium on User Interface Software and Technology (UIST Adjunct ’25). Article 52, pp. 1–3. 2025. https://doi.org/10.1145/3746058.3759007 [PDF]
迫田 海斗, 田井 普, 塚田 浩二. SlimeMolder : 粘菌を観察しながら育む粘菌ファブリケーションシステムの提案. 日本ソフトウェア科学会 WISS2024 予稿集, デモ発表 1-B04. 2024-12. [PDF]
迫田 海斗.粘菌ファブリケーションのための粘菌の自動培養システム.独立行政法人情報処理推進機構(IPA)2024年度未踏IT人材発掘・育成事業 採択.https://www.ipa.go.jp/jinzai/mitou/it/2024/koubokekka.html (最終アクセス:2024年6月21日)
迫田 海斗, 塚田 浩二. SlimeMolder:粘菌ファブリケーションのための自動培養システム. 情報処理学会 インタラクション2024論文集, インタラクティブ発表, 3B-35, pp.1220-1222. 2024-3. [PDF]
迫田 海斗.粘菌の自動培養を目的とした「粘菌無限ランニングマシーン」.一般社団法人新雪 2023年度「北海道ITクリエータ発掘・育成事業(新雪プログラム)」 採択.https://shinsetsu.hokkaido.jp/koubo/2023/result (最終アクセス:2023年10月19日)
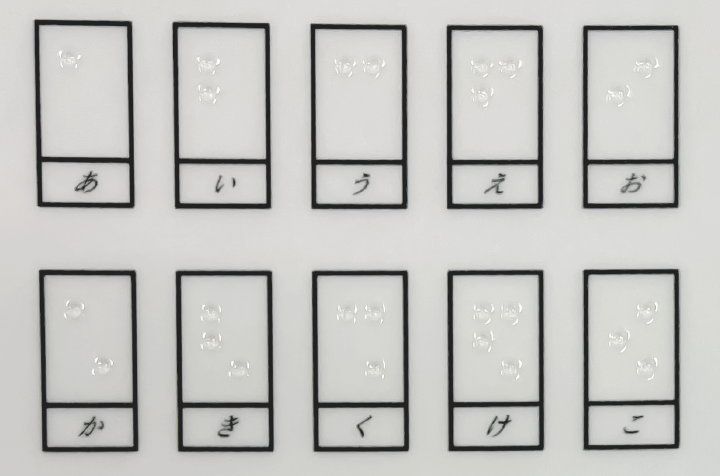
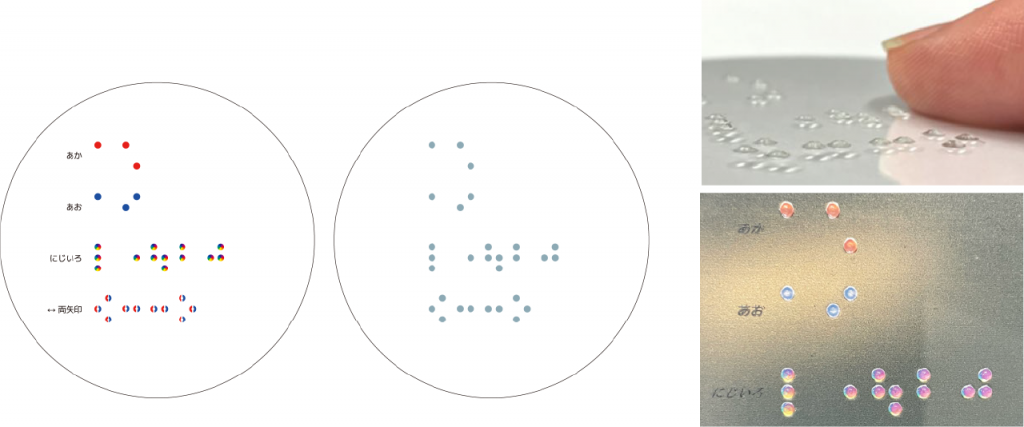
本研究では触覚と視覚のハイブリッド点字の作成とその応用を提案する.UV プリンタで造形したレンズアレイをディスプレイや印刷物と組み合わせることで,視点に応じて二次元方向に画像が変化する情報提示を行う手法が提案されている.本研究では,レンズアレイの突起のサイズを調整することで,点字としても活用できる点に着目した.透明インクを盛り合わせた点字(レンズ)と,その下や周辺にカラーインクで印刷されたパターンを組み合わせることで,晴眼者・視覚障がい者の双方に効果的な情報提示手法を提案する.指先でなぞることで点字として機能しつつ,点字の下に印刷された複数の色やパターンを可視化することができる.具体的な活用例として,案内板や点字絵本,タッチパネルと組み合わせたコントローラー等を実装する.
データ(カラーインク,透明インク)と造形結果の例
Adobe Illustrator 上で,日本語かな50 音等に対応した点字のあいうえお表を作成し,シンボル機能に登録して呼び出すことで,レンズ部のデータ制作の効率化を図った.
発表
中尾 実柚, 沖 真帆, 塚田 浩二. レンズアレイを拡張したハイブリッド点字表現の基礎検討. 情報処理学会 インタラクション2025論文集, インタラクティブ発表, 1B37, pp.377-380. 2025-3. [PDF]