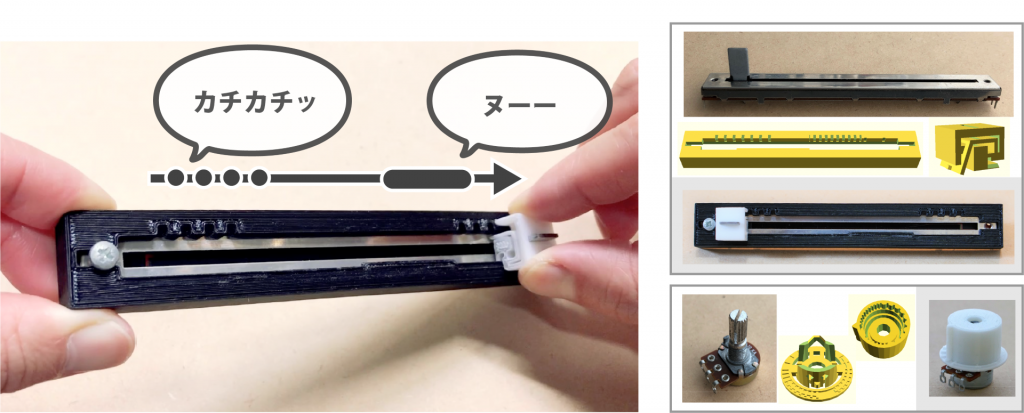
3Dプリンタで造形可能な物理的な機構のみを利用して,可変抵抗(スライダー型/ダイヤル型)に触覚的なフィードバックを与える手法を提案する.一般的な可変抵抗に容易に脱着できる,クリック感と重みを個別に設計できる,低価格なFDM式3Dプリンターで手軽に造形できる,視覚的手掛かりの有無を切り替えて造形できる,等の特徴を持つ.外骨格機構として,スライダー型とダイヤル型の2種類の可変抵抗を対象に実装した.
サンプルデータ
発表
- 塚田 浩二,新山 大翔,沖 真帆.可変抵抗にクリック感と重みを付与する外骨格機構の提案.インタラクション2021論文集,インタラクティブ発表(プレミアム発表),1B02,pp.193-197,2021-03.[PDF]




