これまで,タンジブルユーザインタフェース(TUI) とストーリーテリングを用いた様々な初学者向けの学習支援システムが提案されてきた.本研究では,小型群ロボットを用いた人形遊び的な物語を通して,初歩的なアルゴリズム学習を支援するシステム「SorTale」を提案する.小型ロボット上にオブジェクト(フィギュア)を装着し,ロボットの動きやユーザの操作で構成される物語を体験する過程で,自然とソートアルゴリズムに興味を持てるよう配慮する.
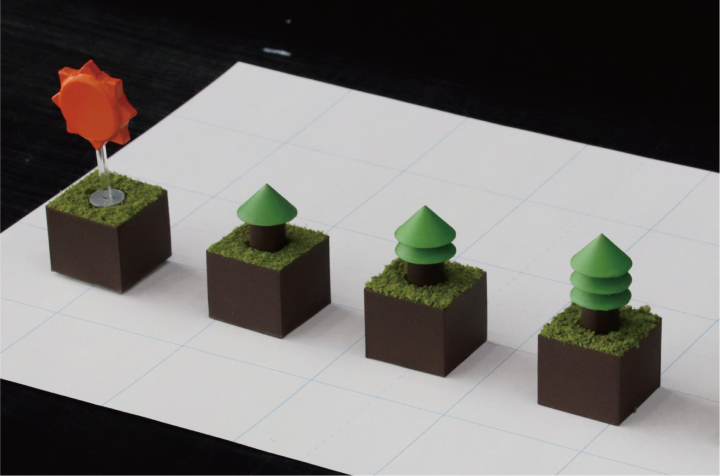
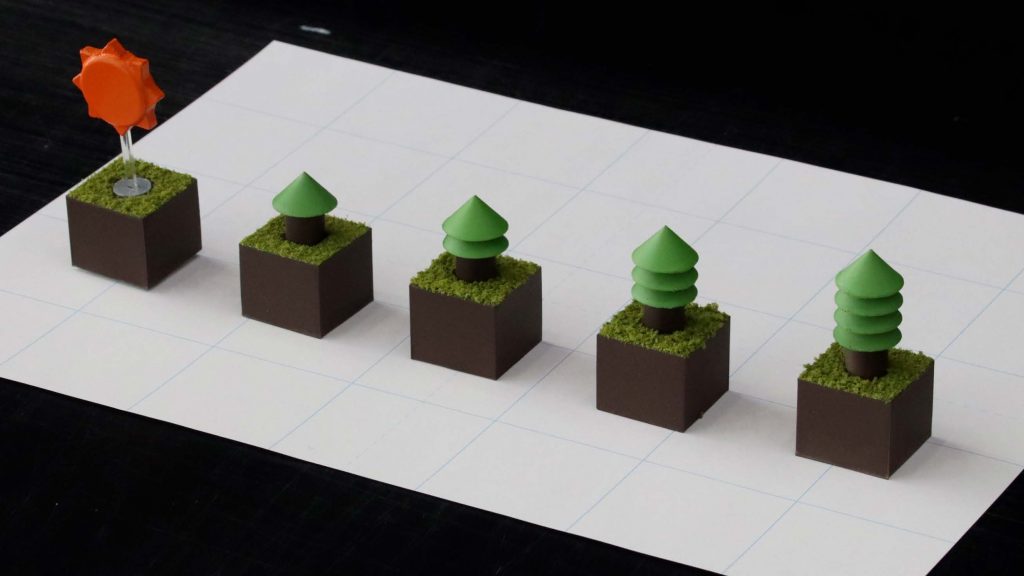
物語例:木と太陽
「ある森では,木たちが一列に並んでいました.その森に,太陽が昇り,光が差し始め,木たちは太陽に向かって歩んでいきます.しかし,背の高い木の後ろでは,低い木はよく光が当たりません.そこで背の高い木は,光が見られるように,場所を交換してあげます.これを繰り返していくと,みんなが光を浴びることができました.」
「木と太陽」の物語におけるSorTaleの外観
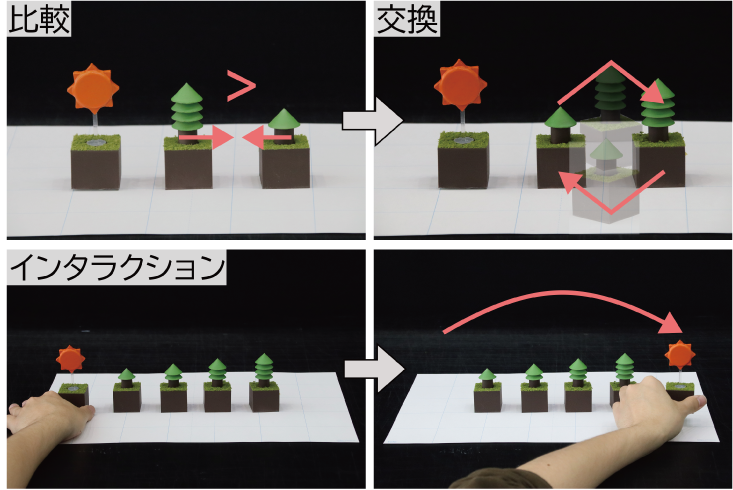
動作例
発表
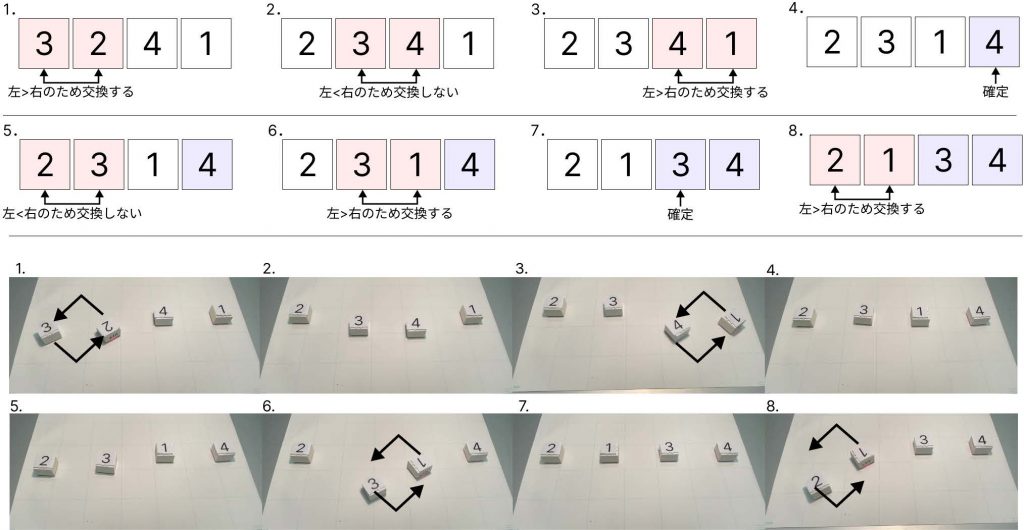
近年,プログラミング教育の早期化にともなって,小学生でも理解しやすい工夫を行ったプログラミング教材などが開発されてきた.その中でも,手に取って扱えるタンジブルなオブジェクトを使ったプログラミング手法が多数提案されている.一方で,ソートや探索のアルゴリズムを学習するためのタンジブルなシステムは少ない.
VIDEO
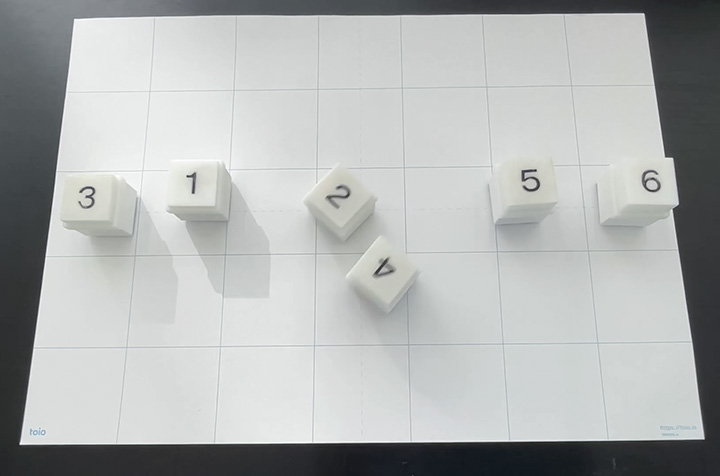
バブルソートの図解と実行の様子
発表
板垣 智也, 塚田 浩二. SorToio:小型群ロボットを用いたアルゴリズム学習支援システムの試作. 情報処理学会研究報告, 2026-HCI-217(4), pp.1-8. 2026-3. [PDF]
Tomoya Itagaki and Koji Tsukada. SorToio: Learning Support System for Algorithm using a Small Swarm Robot. In Adjunct Proceedings of the 38th Annual ACM Symposium on User Interface Software and Technology (UIST Adjunct ’25). Article 53, pp. 1–3. 2025. https://doi.org/10.1145/3746058.3759005 [PDF]
板垣 智也, 塚田 浩二. SorToio: 小型群ロボットを用いたアルゴリズム学習支援システムの提案. 日本ソフトウェア科学会 WISS2024 予稿集, デモ発表 3-A08. 2024-12. [PDF] 【対話発表賞(一般)】
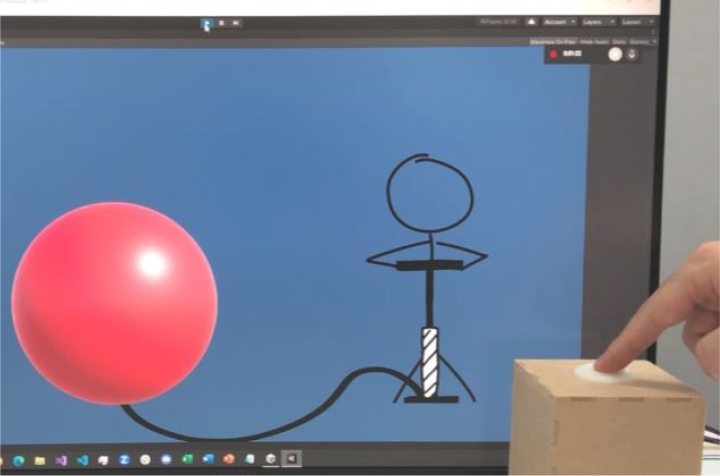
押しボタンは日常の様々な場所で利用される一般的な入力デバイスである.押しボタンの中にも多様な種類があり,押した時の感触(押し心地)が異なる.利用場面に適した押し心地は,システムの操作性を向上させる.
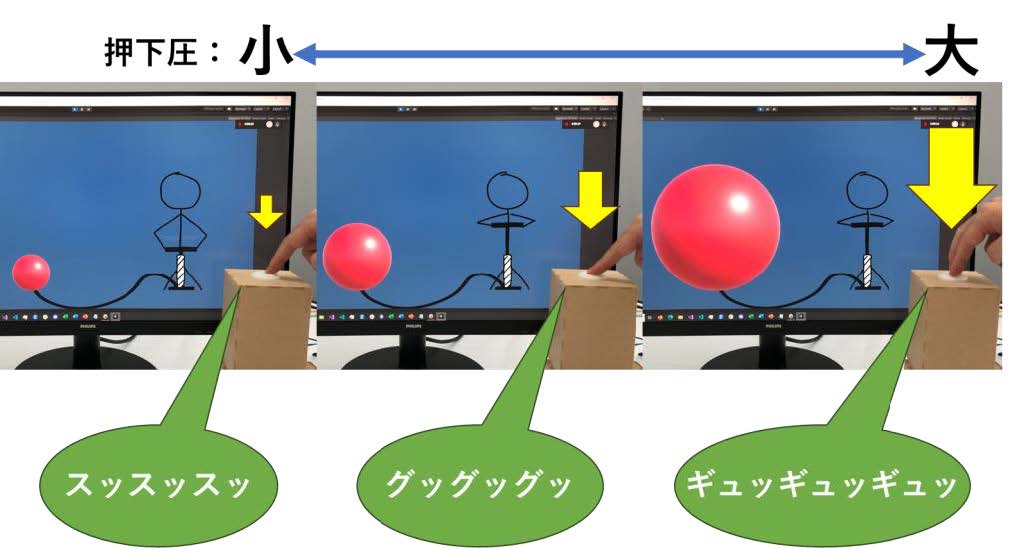
本研究のコンセプト.ボタンの押下圧等を変更することで,動的に押し心地を変更する
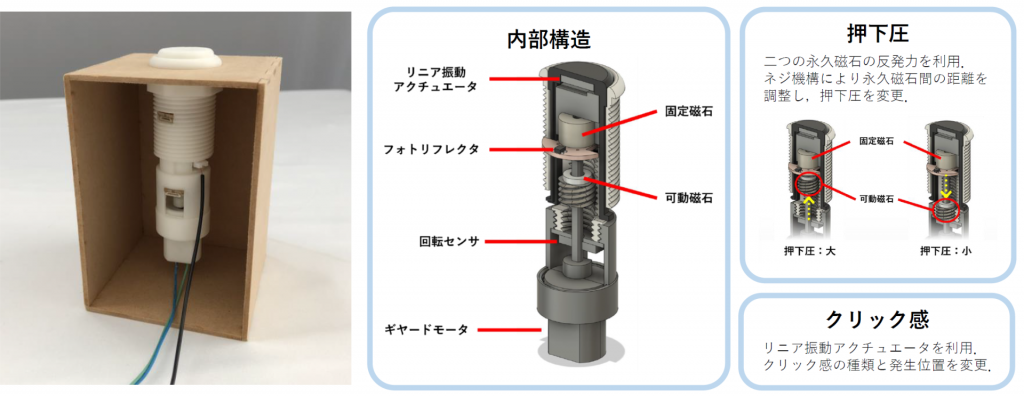
プロトタイプの外観と内部構造
VIDEO
発表・採択
田原 和真, 塚田 浩二. 「推しボタンマトリクス」の提案と試作. 情報処理学会研究報告, 2026-HCI-217(3), pp.1-8. 2026-3. [PDF]
Kazuma Tahara and Koji Tsukada. Force Feedback Button that Focuses on Both Operation and Non-Operation. Proceedings of the SIGGRAPH Asia 2025 Posters. Article 35, pp. 1–2. 2025-12. https://doi.org/10.1145/3757374.3771494
田原 和真,塚田 浩二. 「推しボタンマトリクス」の提案とその応用. 日本ソフトウェア科学会 WISS2025 予稿集, デモ発表 1-A03. 2025-12. [PDF]
田原 和真, 塚田 浩二. 動的に押し心地が変化する押しボタンの試作と評価. 情報処理学会論文誌, Vol.66, No.2, pp. 354-365. 2025-2-15. https://doi.org/10.20729/0002000027 [PDF]
田原 和真, 塚田 浩二. ボタン自体をさりげなく駆動させる情報提示手法の提案. 日本ソフトウェア科学会 WISS2024 予稿集, デモ発表 3-A09. 2024-12. [PDF]
田原 和真.多様な操作環境に適した押し心地を生み出すスマートボタンの提案.一般社団法人新雪 「2024年度北海道ITクリエータ発掘・育成事業(新雪プログラム)」 採択.https://shinsetsu.hokkaido.jp/koubo/2024_result (最終アクセス:2024年09月25日)
田原和真, 塚田 浩二.動的に押し心地が変化する押しボタンの提案.日本ソフトウェア科学会 WISS2023予稿集,ロングティザー T04/デモ発表 3-B11.2023-12. [PDF] 【対話発表賞(一般)】
メディア
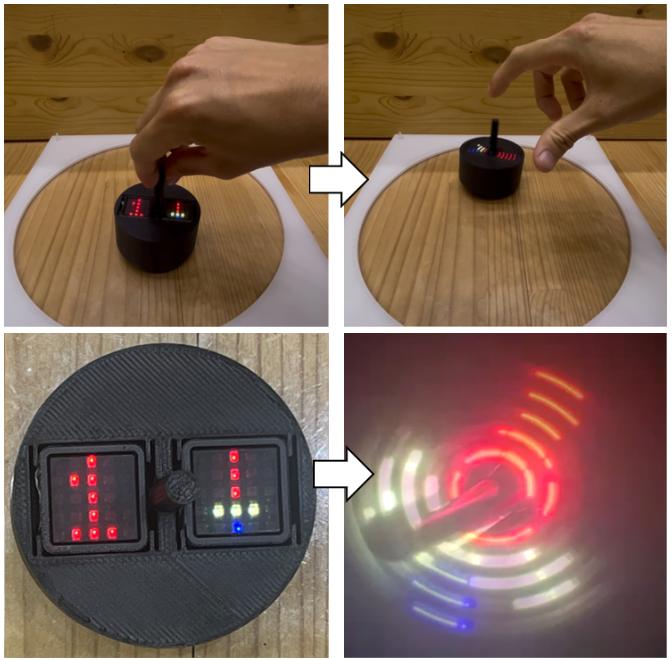
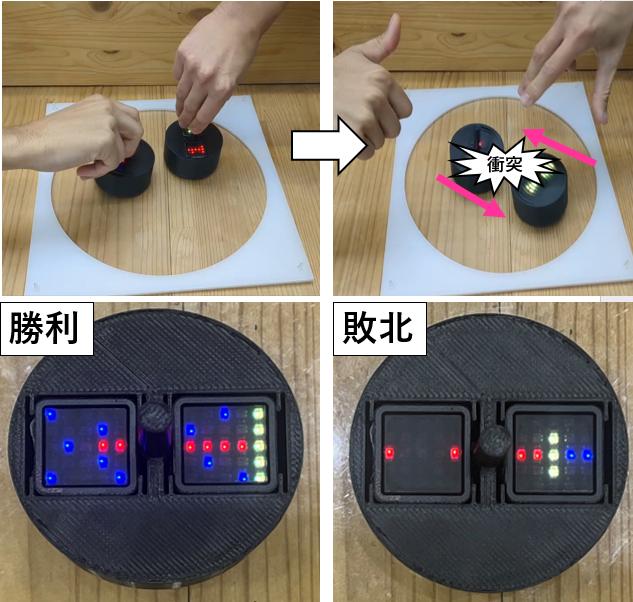
残像ディスプレイは,LED アレイ等を空間上で移動させることで残像を用いて情報提示する仕組みであり,自転車の車輪/扇風機等の多様な残像ディスプレイが提案されている.本研究では,日本の伝統的な玩具である独楽に残像ディスプレイを搭載して,インタラクティブな独楽遊びを支援するシステムを提案する.独楽には複数の LED マトリクスが搭載されており,静止時/回転時に異なる映像を提示する.さらに,内蔵の慣性センサを用いて,独楽同士の衝突等を検出して,インタラクティブな演出を付与できる.
基本動作 対戦ゲームの例 基本動作としては,静止時に表示画像を選択して回すと残像が表示され,回転時間等に応じた演出等が行われる.
発表
澤谷 樹,塚田 浩二. インタラクティブな独楽型残像ディスプレイの提案. 日本ソフトウェア科学会 WISS2025 予稿集, デモ発表 3-C19. 2025-12. [PDF]
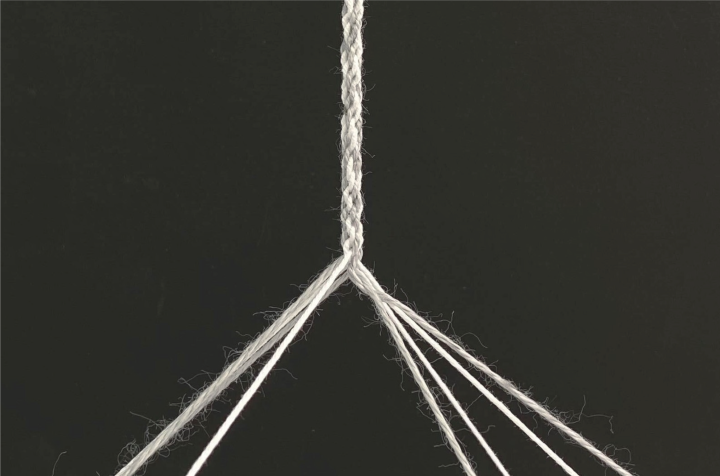
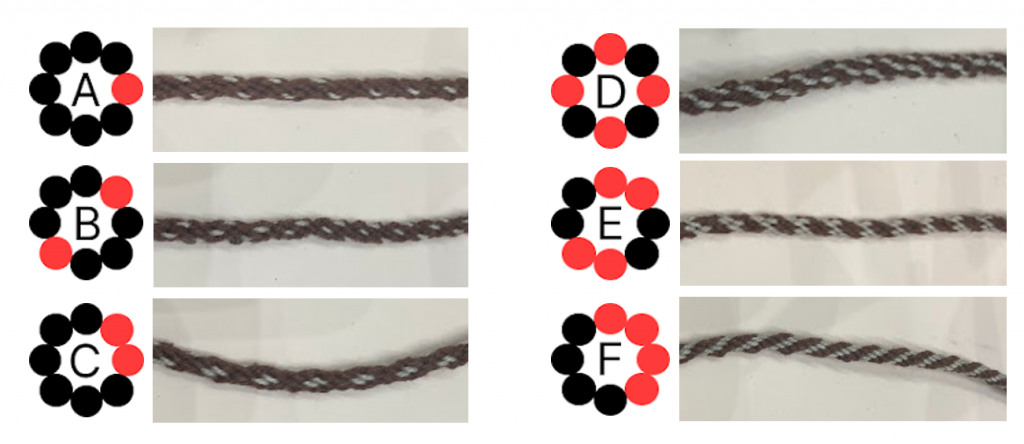
組紐は,柔軟性と強度を併せ持つため,固定や装飾等の多様な用途に利用できる.さらに,材料となる紐を変えることで,外観も美しくデザインできる.本研究では,導電糸と紐の組み方をカスタマイズすることで,異なる特性を持った導電組紐を製作する.さらに,製作した導電組紐の引っ張りや結んだ際の電気的な特性を測定し,その性能を調査する.これらの実験結果に基づき,導電組紐を活用したタンジブル・インタフェースの基礎検討を行う.
製作した導電組紐とその特徴
検証した8打ちのパターン(6種類・約20 cm)
発表
穂積 佳,塚田 浩二,吉田 博則. 機能性繊維を用いた組紐型デバイスの伝統的道具への応用. 日本ソフトウェア科学会 WISS2025 予稿集, デモ発表 1-C07. 2025-12. [PDF]
穂積 佳, 塚田 浩二, 吉田 博則. 導電糸とサーモクロミック糸を用いた 入出力が可能な組紐型デバイスの製作. 情報処理学会 インタラクション2025論文集, インタラクティブ発表(プレミアム発表), 3B58, pp.1272-1277. 2025-3. [PDF]
穂積 佳, 塚田 浩二, 吉田 博則. 導電糸を活用した組紐型タンジブル・インタフェースの基礎検討. 情報処理学会研究報告, 2024-HCI-208(24), pp.1-7. 2024-6. [PDF] 【HCI研究会 2024年度学生奨励賞】